Learning...
Learning...
Emiliano Rodriguez - Projects




~Dr. Moshin Tiwana
This animatronic face was created for UTSA's mechatronics course, this is the first time any university attempts to accomplish this type of project in a 6 week time frame.
The robot has 3 modes:
Mode 0: sleeping (idle), does nothing until mode button is pressed.
mode 1: plays a random voice track from 17 available tracks of his voice.
Mode 2: proximity sensor waits for 2 distance readings (50 & 75 cm) and reads lines from a eye vision test.
mode 3: joystick mode, eyes moved by right joystick. mouth by left joystick and eyelids by left bumper button. Easter egg; if eyelids held down for more than 8 seconds, a series of songs plays along with this mode. If mode button is pressed mode 0 activates and restarts program.
GitHub Package.
This project was inspired by Disney's Treasures Planet robot B.E.N.
BOB The Robot is a desktop companion who will sit with you through any computer related job. Bob has multiple functions to keep you company and entertained at the same time. His brain is powered by an Arduino nano and has built-in LEDs. Bob gets alarmed and activates his "trigger" mode when he feels danger. Bob also works very hard and gets drained (literally) after a few minutes, so if he goes to sleep, make sure to give him a good electric shock (push button) to wake him.
GitHub Package.
This tutorial will demonstrate how to program Darwin OP 2 to execute the program shown below. The algorithm is included in Darwin OP 2's source code by Robotis. However, there is no on-line, or barely any, documentation of this process. The github package will provide everything needed in order to execute the program shown.
Below is a sample program that demonstrates Darwin OP 2's motions. Add both MP3 files inside Data/mp3 and Place both main.cpp and Makefile inside a new folder in directory robotis/Linux/project/tutorial/. Then, type make command to compile executable and type ./utsa to execute program.
GitHub Package.
Generalized potential distribution and gradients, and heat transfer, including transient and steady state conduction, forced and free convection, radiation, and heat exchanger analysis.
Natural or free convection project using colored ice cubes at measured temperatures. This project demonstrates a heat transport via natural convection, read through
formal report.
This project was built for the Measurements and Instrumentations Laboratory. The task was to include atleast one sensor as input and one actuator to respond to the input. Given the freedom to define our own project, I decided to implement both control theory and measurements and instrumentations into a single project.
This self balancing robot has one input accelerometer + Gyroscope (MPU-6050) and two outputs (LCD & DC motors). The motors are controlled via a 4-Channel Motor Drive Shield Board L293D. When the robot is balanced, the LCD displays a smiley face :) when it loses balance, it displays a frowny face :( The gains were modified and tuned using MATLAB's Simulink extension, resulting in a satifying transient response and steady state error values. Code
An integrated coverage of mechanical properties of materials, tolerances, measurement and quality assurance, manufacturing processes, and manufacturing systems, fundamental definitions, design for manufacturing, and mathematical models, hands-on applications related to measurement and manufacturing processes.
This hammer was manufactured in UTSA's machine shop with a variety of machines. Including a Lathe, milling machines and taps and dies. Look through the
CAD.
This PC was self built, researching for each component to verify parity. With a GTX 960 GPU this pc runs almost any applicatoin smoothly. The engineerng aspect of this build was the research, configuration and organization of the parts to fit precisely. Making sure the air flow was just right to avoid over heating. With the use of Grub2, this PC can boot up both windows 10 and Linux. Look through the document.
The switch box was complex in the wiring desing, as it has no programming at all, I had to come up with a parallel circuit which would do two things, turn on the motor when the swith was flipped, and cut the electricity when the box was closed. To do this, I installed two different types of switches; A toggle switch for the user to flip, And a momentary switch, that would shut off the system when the lid laid on top of it. Look through the document.
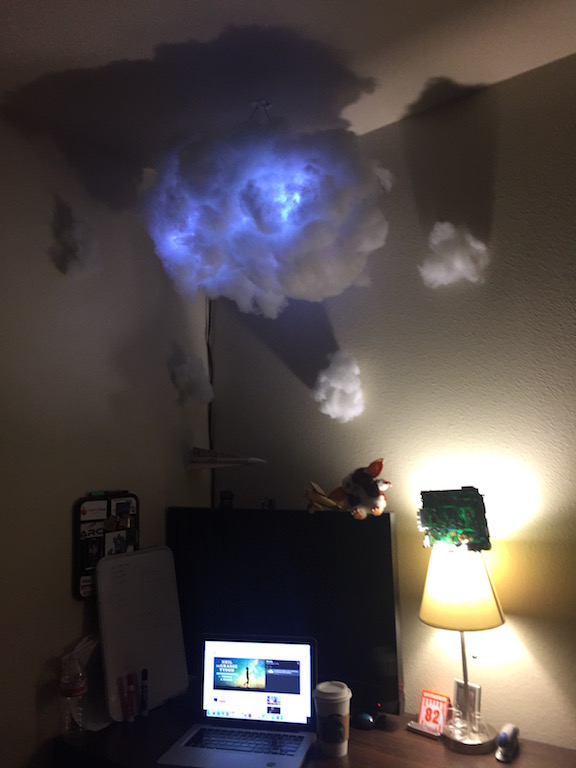
This is an Arduino Programmed LED cloud. This cloud was designed to react to sound, specifically thunder storms. With a built-in microphone, the cloud hears the sound waves and pushes electricity to the strip of LED's. The LED's have several functions, one being the lightning function which keeps the color steady but has random LED's being lit up; Producing a "lightning" like action. The other set of function includes a "fade" style, which lights up the entire cloud with fading colors. Recent adjustments to this project include adding a wireless remote controller for easier usability/changing functions, as well as integrating an ON/OFF switch in comparison to just pluggin-in the cloud. Look through the
document and the code used for it in github.
The objective of this project is to design, build, and test an open source quadrupedal, or four-legged, robot for UTSAs Robotics and Motion Laboratory (RAM Lab). The robot, otherwise known as LilBro, will be used by researchers at the RAM Lab for ongoing agile gait locomotion research. The manufacturer of the robot currently used in the lab does not provide the robots source code with the purchase of the robot. The robot is also expensive and hard to maintain, which is why the Brobotics Inc. team aims to minimize the cost of and maximize accessibility to the robots design. An online Github repository for the project will be created to allow current and future users to easily access the robots source code. The team intends to further increase accessibility to users by designing the fabricated parts of the robot to be 3D printed, which has not been done by any other providers of similar-sized robots.
GitHub Link:
https://github.com/BroboticsInc31/LilBro
Final Report:
Report
RowdyGuide is a fun interactive way to explore UTSA's main campus. This game was designed specifically for new/transfer students who cannot physically visit the campus. A user study was performed and analyzed in order to improve the game.
This exploration game gives acess to a realistic 2D layout of UTSA, there are coins that can be picked up in order to get more familiar with key spots on campus. A user study was performed and evaluated through student test subjects and the data was collected to improve the game. Navigate through UTSA and get familiar in a fun interactive way! Download (for windows) & play the Game!
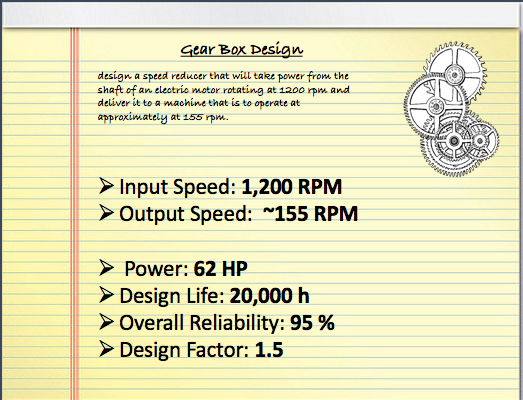
Mechanical engineering design, a 62 hp spur gear speed reducer takes power from an input shaft of an electric motor, rotating at 1,200 rpm, delivering it to a machine that operates at approximately at 155 rpm.
The design sequence is as follows:
- Gear specification
- Shaft layout
- Force analysis
- Shaft material selection
- Shaft design for stress (fatigue & static)
- Shaft design for deflection
- Bearing selection
- Key and retaining ring selection
- Final analysis (FEM)
Applications Programming group project - Inspired by how many people have a hard time typing on their computers. In order to build this application, the team faced many challenges; From learning a new programming language (Java), to file handling, we surpassed and completed our application before the deadline. Learning how to work and coordinate with a bigger group of people, developing through git and assigning roles for each team member. This application was overall a great engineering challenge. Look trough our
Code on github.
Texas State University's FSAE team began the semester I transferred and was sub-divided into several teams. Engine, body and electrical teams. Electrical had two sub groups; HUD and Active Aerodynamics. While I attended Texas State I was part of the active aero team, we divised a plan on how the overall system would work and communicated with the body team to plan accordingly. Before leaving, we finished our CAD of the system. Follow their work.
ARC's first focus is Rockets, When first starting you are put to the test to put a small class A rocket together with no prior knowledge. Then quickly move into higher classes as you successfuly put rockets in the air. With full success, in the very first semester we constructed a class F rocket, launching up to 2,000 feet in the air. Look through the document.
With some rocket experience and knowing how Ohm's law works. I was able to construct a fully working circuit which would be able to launch 5 F Class engines simultaneously.In direct communication with the multi-engine team, I was able to configure the right dimensions and alignments. This project is also able to launch multiple lower class rockets at the same time. Look through the document.
After working with many electronics and understanding how wireless connections worked, I manufactured my first wireless controller. Able to launch rockets or other pyrotechniques. This controller has an ON/OFF switch which lets you know current is ready to launch at the press of a button. When the button is pressed, A transistor closes the parallel circuit inside the box and releases enough current to light the rocket engines. Look through the document.
LinkedIn
GitHub I.G. copyright Emiliano Rodriguez 2018 Back To Top
Bob The Robot
Robotis-OP2
Self Balancing Robot (Mall-E)



Sound Reacting Lightning Cloud
Multi-verse holographic box
 This box illustrates what a portal to another universe looks like. It is a simple box that contains contents which give the illusion of another world inside of it. Check out the video below to see it in action.
This box illustrates what a portal to another universe looks like. It is a simple box that contains contents which give the illusion of another world inside of it. Check out the video below to see it in action.
Group Projects:
Senior Design - Open Source Quadruped Robot
User Interfaces - RowdyGuide
Power Transmission Design
![]()
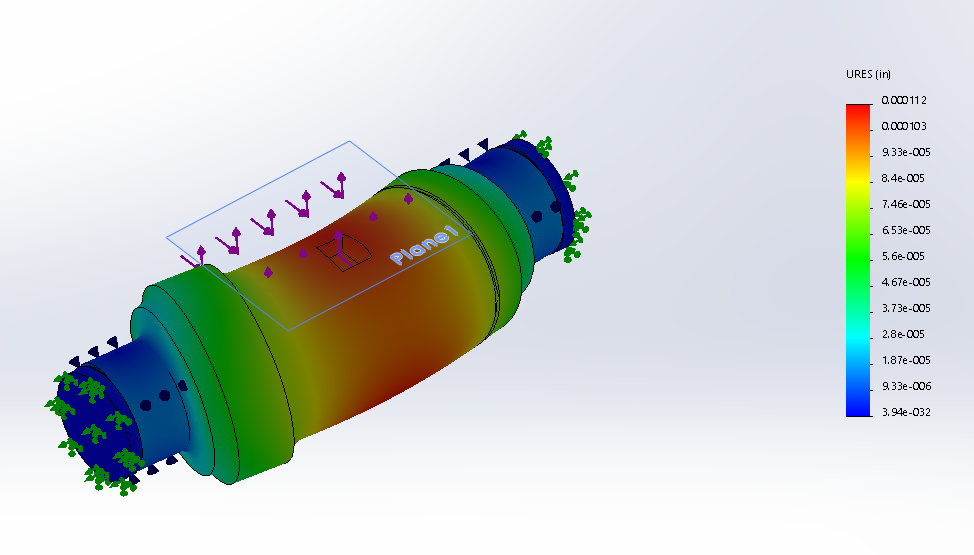 The design was analytically checked through hand calculations and a MATLAB script as well as simulated and tested through SolidWorks. Finite Element Method was utilized to check the von mises stress and deflections on each shaft. Check out the full Report
The design was analytically checked through hand calculations and a MATLAB script as well as simulated and tested through SolidWorks. Finite Element Method was utilized to check the von mises stress and deflections on each shaft. Check out the full Report
Application Programming - KeyBoard Hero
FSAE - Active Aerodynamic Wings
ARC - Multi-Engine Rocket Launch Circuit
[Project Lead]
ARC - Wireless Launch Controller
[Project Lead]
Future Projects:
contact:

 Twitter
Twitter